Presented with the competition challenge, we decided to take the most straightforward approach and focus our efforts on reliability and speed. Because of this, we decided to attempt to beat the wall of fire with speed, designing a fast robot and animal pickup mechanism.
In order to cut out any complexity that is not absolutely necessary for the completion of the course, we chose to avoid the zip-line, and any throwing mechanisms. Instead we made a lightweight robot with fewer parts, that was able to navigate the course quickly enough to return past the wall of fire before the 26 second mark.
This simpler robot was also relatively easy to construct, allowing for extra time for troubleshooting after it was built, and for modifications in strategy when things didn't work the way we had anticipated.
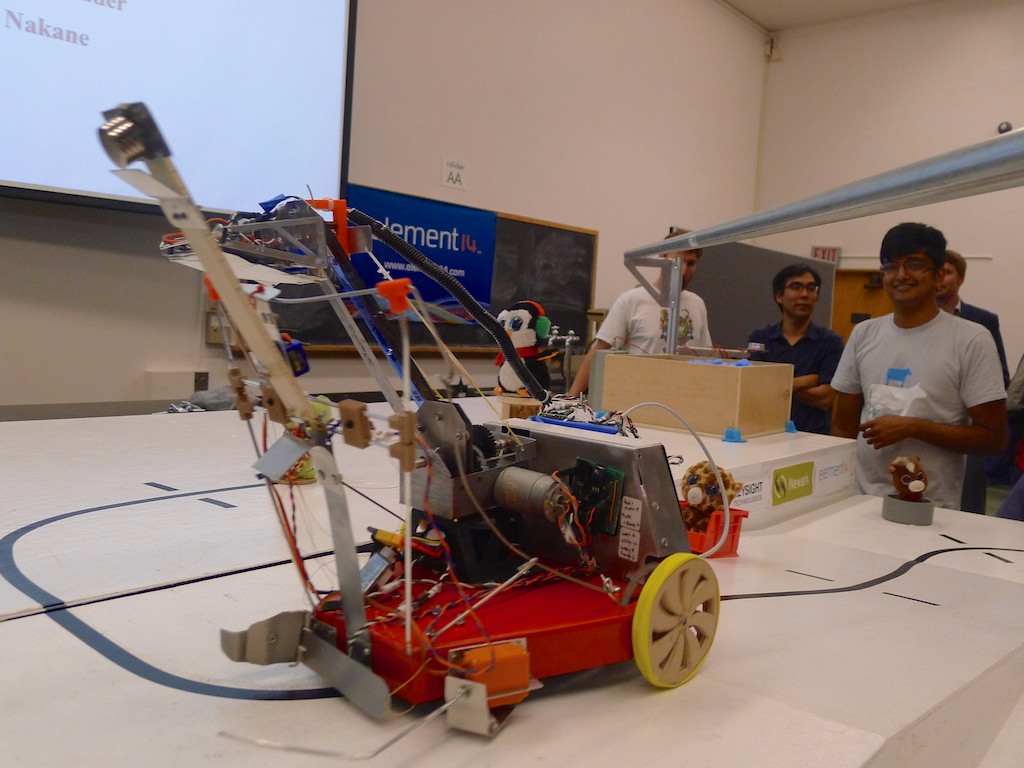
Our robot begins the competition by tape following past animals 1,2 and 3 without picking them up. It picks up animal 4, using a small arm that reaches out in front of the robot. This pick-up triggers the algorithm used to find and pick up animal 5, using the main arm of the robot, rotated to the proper height. After collecting animal 5, the robot continues to the bucket containing animal 6. It drops an arm into the bucket and magnetically picks up the animal under foam. It then performs a 180-degree turn, and uses the IR exit beacon to re-find the black tape. Once the black tape has been found, the robot will line follow back to the entrance, and pick up animals 3, 2, and 1 on its left side.
This approach allowed us to have a time advantage while running the course, as our robot was the fastest out of all competing bots, able to collect all 6 pets and return them to the safe area in 41 seconds during testing.